- Wyposażenie:
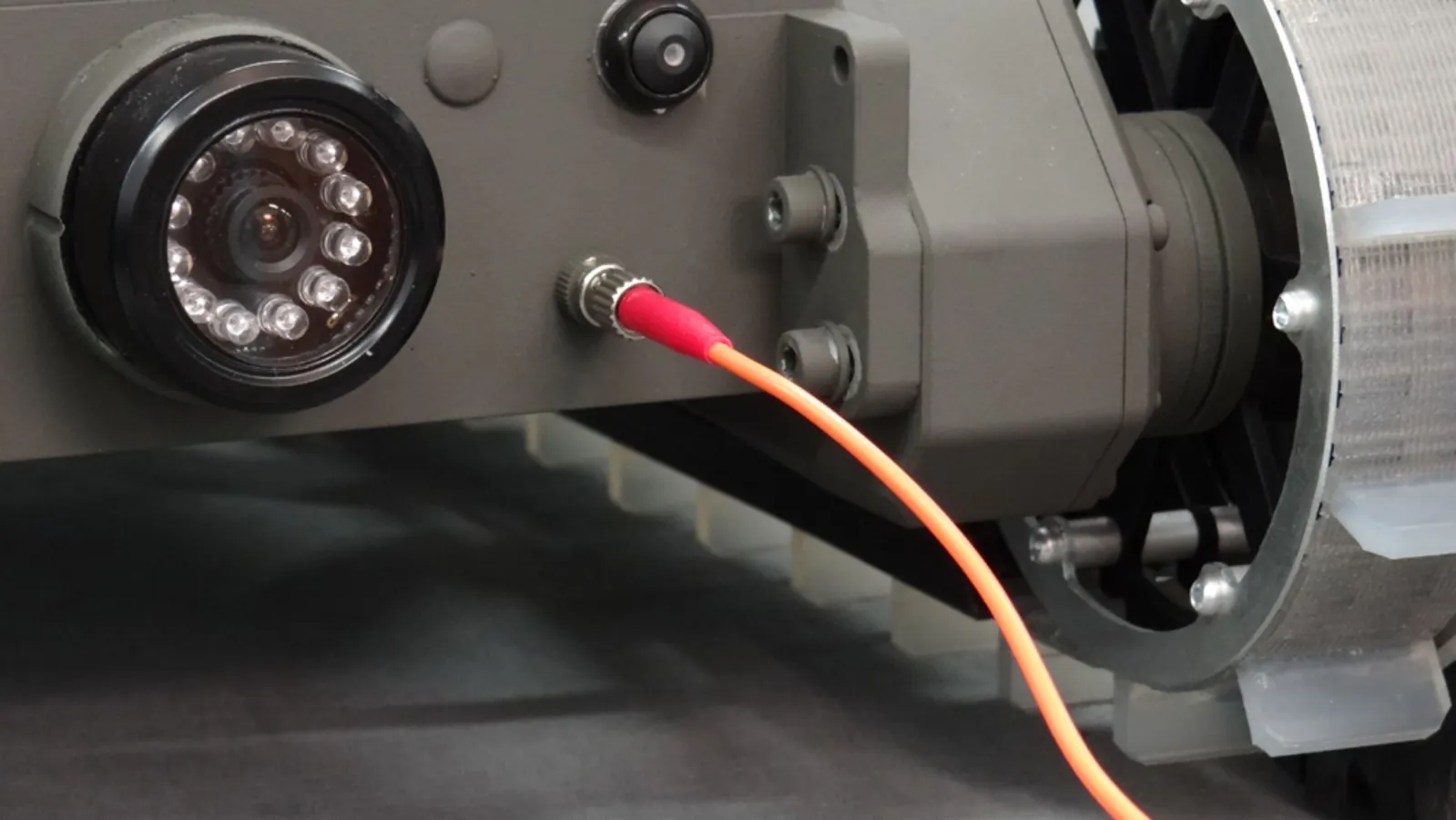
- kamera z oświetlaczami IR do użytku w dzień i w nocy
- lasery (2szt)
- włącznik bezpieczeństwa
- waga [kg]: 2,1
- wymiary [cm]: 12-20 (szer) x14 (wys) x 11(dł)
 umożliwia zamontowanie strzelby typu Benelli M4 Super 90
umożliwia zamontowanie strzelby typu Benelli M4 Super 90- wyposażony w celownik laserowy, złącze akcesoriów i włącznik bezpieczeństwa
- materiały: stal + aluminium
- waga [ kg]: 3
- wymiary [cm]: 68 (dł) x24 (wys) x10,5 (szer)
 Robot PIAP GRYF może współpracować z urządzeniem rentgenowskim składającym się z generatora promieniowania oraz ekranu. Urządzenie rentgenowskie musi być zainstalowane
Robot PIAP GRYF może współpracować z urządzeniem rentgenowskim składającym się z generatora promieniowania oraz ekranu. Urządzenie rentgenowskie musi być zainstalowane
w uchwycie- Uchwyt urządzenia rentgenowskiego składa się z:
- uchwytu do zaciskania w chwytaku
- wysięgnika teleskopowego
- uchwytu ekranu
- uchwytu generatora promieniowania




- umożliwia sterowanie robotem przy braku łączności radiowej
- niezbędna do podłączenia repeater’a
- ręczna nawijarka światłowodowa składa się z:
- Korpusu
- Korby
- Przewodu światłowodowego krótkiego
- Przewodu światłowodowego długiego (nawiniętego na bębnie)
- Uchwytów mocujących do szyny RIS
- waga [kg]: 3,1
- wymiary [cm]: 21(dł) x 25(szer) x 28(wys)
- parametry techniczne światłowodu:
- Minimalny promień gięcia 25mm;
- Maksymalna siła rozciągająca 300N (30,5 kg).
- dostępne długości [m]: 150, 300
 umożliwia sterowanie robotem przy braku łączności radiowej
umożliwia sterowanie robotem przy braku łączności radiowej- długość przewodu: do 300m
- waga [kg]:6,15
- wymiary [cm]: 28(dł) x23(szer) x24(wys)

 do zdalnego odpalania ładunków wybuchowych
do zdalnego odpalania ładunków wybuchowych
 Robot PIAP GRYF posiada dwukierunkową łączność audio pomiędzy robotem i konsolą sterowania. Domyślnie aktywny jest kanał audio przesyłający dźwięk z mikrofonów robota do głośnika umieszczonego w konsoli sterowania. Aktywacja kanału przesyłającego dźwięk z mikrofonu konsoli sterowania do głośnika robota wymaga przyciśnięcia i przytrzymania przycisku PTT (Push To Talk).
Robot PIAP GRYF posiada dwukierunkową łączność audio pomiędzy robotem i konsolą sterowania. Domyślnie aktywny jest kanał audio przesyłający dźwięk z mikrofonów robota do głośnika umieszczonego w konsoli sterowania. Aktywacja kanału przesyłającego dźwięk z mikrofonu konsoli sterowania do głośnika robota wymaga przyciśnięcia i przytrzymania przycisku PTT (Push To Talk).
 mały panel sterujący, umożliwiający kierowanie robotem
mały panel sterujący, umożliwiający kierowanie robotem- wewnętrzny akumulator (ładowarka 230v)
- waga[kg]:0,43
- wymiary [cm]: 16,5(dł)x11(szer)x3,5 [+3,5 joysticki](wys)
- zasięg [m]: 10 (w przestrzeni otwartej)
- czas pracy: szacowany na min 1 godz

 Zapasowy akumulator do stanowiska operatorskiego
Zapasowy akumulator do stanowiska operatorskiego
 Umożliwia ciągłą pracę stanowiska operatorskiego podczas podłączenia do źródła prądu
Umożliwia ciągłą pracę stanowiska operatorskiego podczas podłączenia do źródła prądu
 2 krotnie zwiększa zdolności operacyjne robota
2 krotnie zwiększa zdolności operacyjne robota- pozwala zwiększyć zasięg komunikacji radiowej podczas sterowania z pojazdów lub pomieszczeń
 wybijak pracuje automatycznie i nie wymaga
wybijak pracuje automatycznie i nie wymaga
dodatkowych czynności obsługowych.- wybijak składa się z:
- grota zakończonego węglikiem spiekanym i układu
młotka wewnętrznego. Obejma umożliwia uchwycenie wybijaka przez
szczęki chwytaka
- grota zakończonego węglikiem spiekanym i układu
 Metalowy koszyk transportowy ułatwiający bezpieczny przewóz ciężkiego ładunku
Metalowy koszyk transportowy ułatwiający bezpieczny przewóz ciężkiego ładunku
 Wymazówka środowiskowa
Wymazówka środowiskowa- Próbnik podłoża
- Zestaw próbników kryminalistycznych
- Adsorber SPME
- R-Sensor (zintegrowany EKO-C)

 Wybijanie szyb, dziur w powierzchniach, opraw zamkowych i innych małych elementów (zasada „kafara”)
Wybijanie szyb, dziur w powierzchniach, opraw zamkowych i innych małych elementów (zasada „kafara”)- Przebijanie przedmiotów np. opony
- Rozbijanie zawiasów
- Przecinanie metalowych prętów, kabli, drutów, łańcuchów, rurek
- Odcinanie elementów
- Inicjowanie lontów nieelektrycznych systemów detonacji jak STS, NDS, NONEL
- Podstawowe końcówki robocze:
- Nożyce do cięcia kabli, drutów i prętów;
- Wybijaki do szyb oraz innych elementów;
- Przebijaki;
- Wyzwalacze do inicjowania wybuchu za pomocą nieelektrycznych systemów detonacji;
- Noże (ostrza) odcinające;
- Możliwość zaprojektowania końcówek na konkretne zapotrzebowanie użytkownika.

 do identyfikacji błędów i usterek robota
do identyfikacji błędów i usterek robota- do zmian ustawień i konfiguracji robota
- złącze akcesoriów i SVGA

 umożliwia widzenie w nocy
umożliwia widzenie w nocy- mocowana przy kamerze chwytakowej
- zasilanie z robota
- funkcja zdalnego wyłączania przy przełączaniu widoku kamery
- wymiary [cm]: 20(dł) x 9 (wys) x ?(szer)